网友您好, 请在下方输入框内输入要搜索的题目:
题目内容
(请给出正确答案)
均质圆盘质量为m,半径为R,在铅垂面绕内O轴转动,图示瞬间角速度为ω,则其对O轴的动量矩大小为( )。
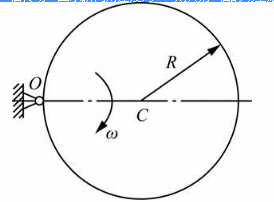
A.mRω
B.mRω/2
C.mR2ω/2
D.3mR2ω/2
B.mRω/2
C.mR2ω/2
D.3mR2ω/2
参考答案
参考解析
解析:根据质点的动量矩公式,体系对O点的动量矩为:

更多 “均质圆盘质量为m,半径为R,在铅垂面绕内O轴转动,图示瞬间角速度为ω,则其对O轴的动量矩大小为( )。 A.mRω B.mRω/2 C.mR2ω/2 D.3mR2ω/2” 相关考题
考题
质量为m,半径为R的均质圆轮,绕垂直于图面的水平轴O转动,其角速度为w。在图示瞬时,角加速度为0,轮心C在其最低位置,此时将圆轮的惯性力系向O点简化, 其惯性力主矢和惯性力主矩的大小分别为:
考题
如图所示,曲柄OA长R,以匀角速度ω绕O轴转动,均质圆轮B在水平面上做纯滚动,其质量为m,半径为r。在图示瞬时,OA杆铅直。圆轮B对接触点C的动量矩为( )mRrω。
A.0.5
B.1.0
C.1.5
D.2.0
考题
质量为m,半径为R的均质圆轮,绕垂直于图面的水平轴O转动,其角速度为w。在图示瞬时,角加速度为O,轮心C在其最低位置,此时将圆轮的惯性力系向O点简化,其惯性力主矢和惯性力主矩的大小分别为:
考题
质量为m,半径为R的均质圆盘,绕垂直于图面的水平轴O转动,其角速度为ω,在图示瞬时,角加速度为零,盘心C在其最低位置,此时将圆盘的惯性力系向O点简化, 其惯性力主矢和惯性力主矩的大小分别为:
考题
质量为m,半径为R的均质圆盘,绕垂直于图面的水平轴O转动,其角速度为ω,在图4-78示瞬时,角加速度为零,盘心C在其最低位置,此时将圆盘的惯性力系向O点简化,其惯性力主矢和惯性力主矩的大小分别为()。
考题
如图4-65所示,忽略质量的细杆OC=l,其端部固结均质圆盘。杆上点C为圆盘圆心。盘质量为m。半径为r。系统以角速度ω绕轴O转动。系统的动能是( )。
热门标签
最新试卷